Končno stikalo za nihanje tuljave s plastično konico

-

Robustno ohišje
-

Zanesljivo delovanje
-

Izboljšano življenje
Opis izdelka
Miniaturna končna stikala Renew serije RL8 ponujajo izboljšano vzdržljivost in odpornost na zahtevna okolja, z mehansko življenjsko dobo do 10 milijonov operacij. Zaradi tega so idealna za kritične in zahtevne aplikacije, kjer standardna osnovna stikala ne bi zadostovala. Z gibljivo vzmetno palico je mogoče končna stikala z nihanjem tuljave upravljati v več smereh (razen v aksialnih smereh), kar omogoča odpravljanje nepravilnosti. Popolnoma so primerna za zaznavanje predmetov, ki se približujejo iz različnih kotov. Za različne aplikacije sta na voljo plastična in žična konica.
Dimenzije in obratovalne značilnosti
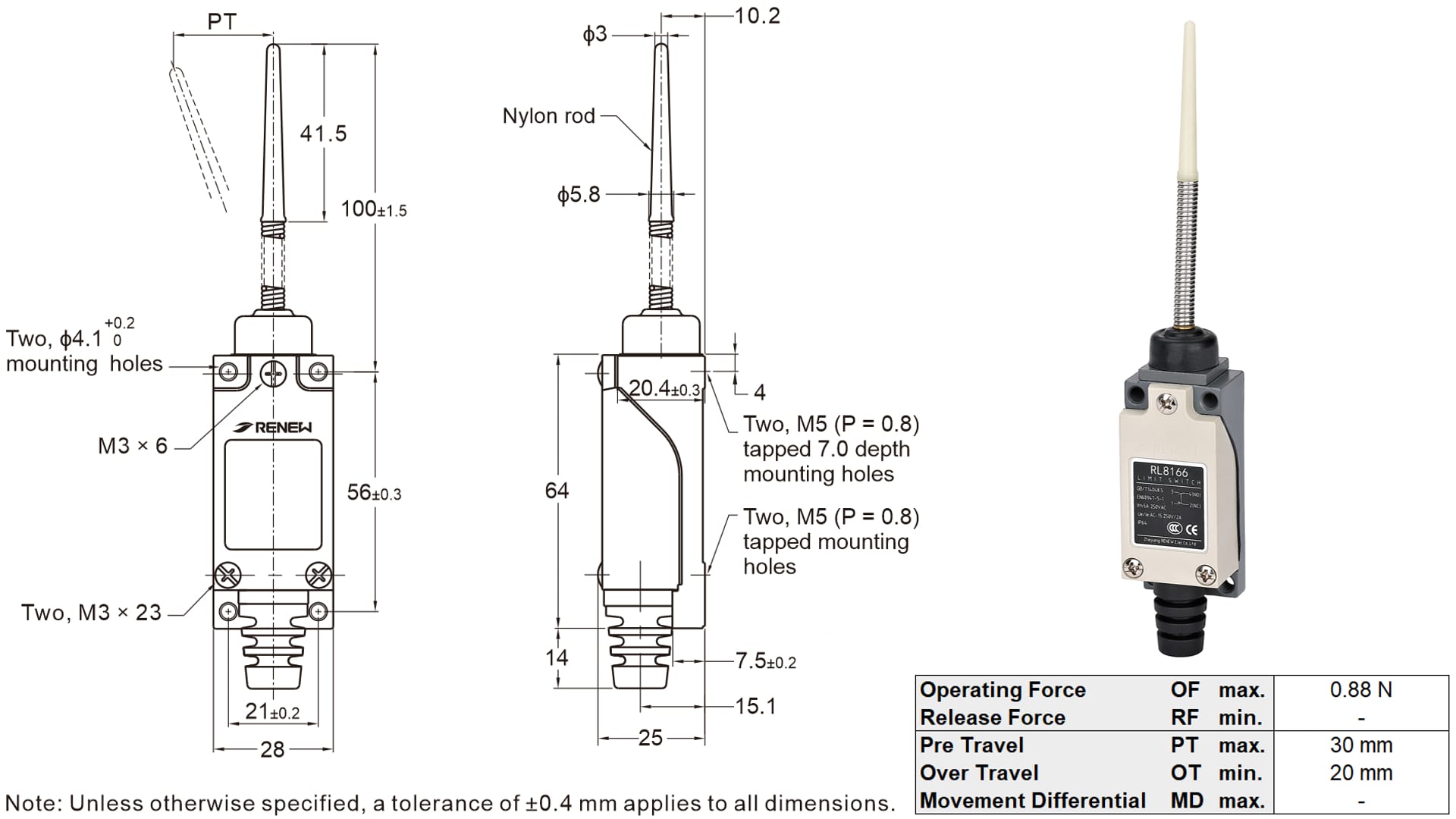
Splošni tehnični podatki
| Nazivna moč ampera | 5 A, 250 V AC |
| Izolacijska upornost | Min. 100 MΩ (pri 500 VDC) |
| Kontaktna upornost | 25 mΩ maks. (začetna vrednost) |
| Dielektrična trdnost | Med kontakti iste polarnosti 1000 V AC, 50/60 Hz za 1 minuto |
| Med kovinskimi deli, ki prevajajo tok, in ozemljitvijo ter med vsakim priključkom in kovinskimi deli, ki ne prevajajo tok 2000 V AC, 50/60 Hz za 1 minuto | |
| Odpornost na vibracije pri okvari | 10 do 55 Hz, dvojna amplituda 1,5 mm (motnja: največ 1 ms) |
| Mehanska življenjska doba | 10.000.000 operacij najmanj (120 operacij/min) |
| Električna življenjska doba | 300.000 operacij min. (pod nazivno upornostjo) |
| Stopnja zaščite | Splošna uporaba: IP64 |
Uporaba
Renewova miniaturna končna stikala igrajo ključno vlogo pri zagotavljanju varnosti, natančnosti in zanesljivosti različnih naprav na različnih področjih. Tukaj je nekaj priljubljenih ali potencialnih aplikacij.

Skladiščna logistika in procesi
V sodobnih skladiščih in tovarnah se ta končna stikala lahko uporabljajo v pakirnih strojih za zaznavanje nepravilno oblikovanih paketov, ki se premikajo po tekočem traku. Fleksibilna palica se upogne v obliko paketa in sproži stikalo. Uporabljajo se lahko tudi v robotiki in avtomatiziranih sistemih za zaznavanje končnih položajev robotskih rok ali gibljivih delov, ki se morda ne poravnajo vedno popolnoma.













