Vodoravno končno stikalo ročice tečaja

-

Robustno ohišje
-

Zanesljivo delovanje
-

Izboljšano življenje
Opis izdelka
Renewova horizontalna končna stikala serije RL7 so zasnovana za večjo vzdržljivost in odpornost na zahtevna okolja, do 10 milijonov operacij mehanske življenjske dobe, zaradi česar so primerna za kritične in težke vloge, kjer običajna osnovna stikala niso mogoča. Stikalo s tečajno ročico ponuja daljši doseg in prilagodljivost pri aktiviranju, kar omogoča enostavno aktiviranje in je idealno za aplikacije, kjer prostorske omejitve ali nerodni koti otežujejo neposredno aktiviranje.
Dimenzije in obratovalne značilnosti
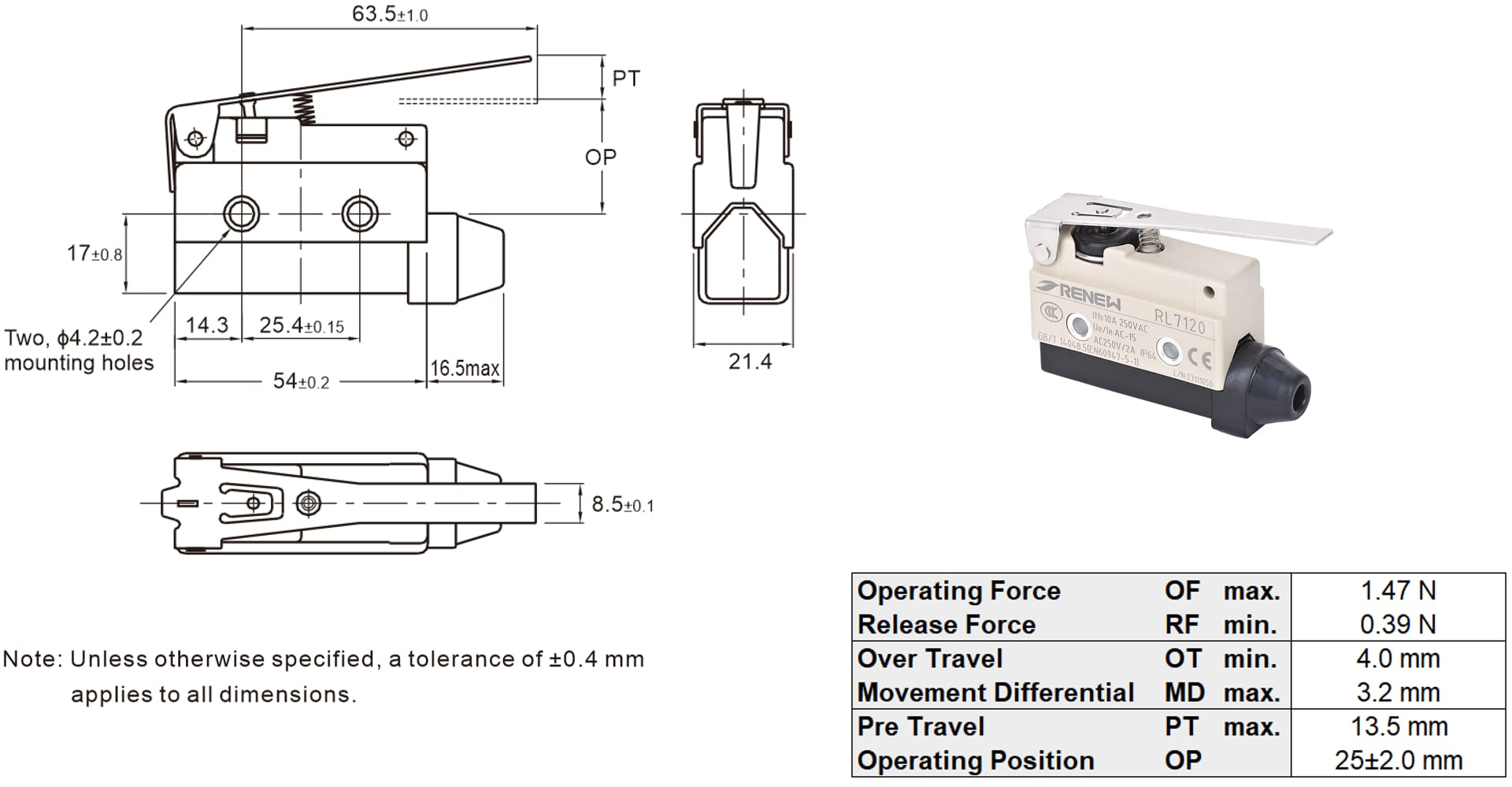
Splošni tehnični podatki
| Nazivna moč ampera | 10 A, 250 V AC |
| Izolacijska upornost | Min. 100 MΩ (pri 500 VDC) |
| Kontaktna upornost | Največ 15 mΩ (začetna vrednost za vgrajeno stikalo pri samostojnem testiranju) |
| Dielektrična trdnost | Med kontakti iste polarnosti 1000 V AC, 50/60 Hz za 1 minuto |
| Med kovinskimi deli, ki prevajajo tok, in ozemljitvijo ter med vsakim priključkom in kovinskimi deli, ki ne prevajajo tok 2000 V AC, 50/60 Hz za 1 minuto | |
| Odpornost na vibracije pri okvari | 10 do 55 Hz, dvojna amplituda 1,5 mm (motnja: največ 1 ms) |
| Mehanska življenjska doba | 10.000.000 operacij najmanj (50 operacij/min) |
| Električna življenjska doba | 200.000 operacij min. (pri nazivni uporovni obremenitvi, 20 operacij/min) |
| Stopnja zaščite | Splošna uporaba: IP64 |
Uporaba
Horizontalna končna stikala podjetja Renew igrajo ključno vlogo pri zagotavljanju varnosti, natančnosti in zanesljivosti različnih naprav na različnih področjih. Tukaj je nekaj priljubljenih ali potencialnih aplikacij.
Zglobne robotske roke in prijemala
Integriran v prijemala zapestja robotske roke za zaznavanje pritiska prijema in preprečevanje prekomernega raztezanja, ter integriran v zgibne robotske roke za uporabo v krmilnih sklopih in zagotavljanje končnega položaja in vodenja v mrežnem slogu.













